Rigid-body mesh motion solver for fvMesh. More...
Public Member Functions | |
| TypeName ("rigidBodyMotionSolver") | |
| Runtime type information. More... | |
| rigidBodyMeshMotionSolver (const polyMesh &, const dictionary &dict) | |
| Construct from polyMesh and dictionary. More... | |
| rigidBodyMeshMotionSolver (const rigidBodyMeshMotionSolver &) | |
| Disallow default bitwise copy construction. More... | |
| ~rigidBodyMeshMotionSolver () | |
| Destructor. More... | |
| virtual tmp< pointField > | curPoints () const |
| Return point location obtained from the current motion field. More... | |
| virtual void | solve () |
| Solve for motion. More... | |
| virtual void | movePoints (const pointField &) |
| Update local data for geometry changes. More... | |
| virtual void | updateMesh (const mapPolyMesh &) |
| Update local data for topology changes. More... | |
| virtual bool | write () const |
| Write motion state information for restart. More... | |
| void | operator= (const rigidBodyMeshMotionSolver &)=delete |
| Disallow default bitwise assignment. More... | |
 Public Member Functions inherited from motionSolver Public Member Functions inherited from motionSolver | |
| TypeName ("motionSolver") | |
| Runtime type information. More... | |
| declareRunTimeSelectionTable (autoPtr, motionSolver, dictionary,(const polyMesh &mesh, const dictionary &dict),(mesh, dict)) | |
| motionSolver (const polyMesh &mesh, const dictionary &, const word &type) | |
| Construct from polyMesh and dictionary and type. More... | |
| virtual autoPtr< motionSolver > | clone () const |
| Clone function. More... | |
| virtual | ~motionSolver () |
| Destructor. More... | |
| const polyMesh & | mesh () const |
| Return reference to mesh. More... | |
| const dictionary & | coeffDict () const |
| Const access to the coefficients dictionary. More... | |
| virtual tmp< pointField > | newPoints () |
| Provide new points for motion. Solves for motion. More... | |
| virtual void | twoDCorrectPoints (pointField &) const |
| Public Member Functions inherited from rigidBodyMotion | |
| rigidBodyMotion () | |
| Construct null. More... | |
| rigidBodyMotion (const dictionary &dict) | |
| Construct from dictionary. More... | |
| rigidBodyMotion (const dictionary &dict, const dictionary &stateDict) | |
| Construct from constant and state dictionaries. More... | |
| rigidBodyMotion (const rigidBodyMotion &) | |
| Disallow default bitwise copy construction. More... | |
| ~rigidBodyMotion () | |
| Destructor. More... | |
| bool | report () const |
| Return the report Switch. More... | |
| const rigidBodyModelState & | state () const |
| Return the motion state. More... | |
| rigidBodyModelState & | state () |
| Return the motion state for modification. More... | |
| spatialTransform | X00 (const label bodyId) const |
| Return the initial transform to the global frame for the. More... | |
| void | newTime () |
| Store the motion state at the beginning of the time-step. More... | |
| void | forwardDynamics (rigidBodyModelState &state, const scalarField &tau, const Field< spatialVector > &fx) const |
| Calculate and optionally relax the joint acceleration qDdot from. More... | |
| void | solve (const scalar t, const scalar deltaT, const scalarField &tau, const Field< spatialVector > &fx) |
| Integrate velocities, orientation and position. More... | |
| void | status (const label bodyID) const |
| Report the status of the motion of the given body. More... | |
| tmp< pointField > | transformPoints (const label bodyID, const pointField &initialPoints) const |
| Transform the given initial pointField of the specified body. More... | |
| tmp< pointField > | transformPoints (const label bodyID, const scalarField &weight, const pointField &initialPoints) const |
| Transform the given initial pointField of the specified body. More... | |
| tmp< pointField > | transformPoints (const labelList &bodyIDs, const List< const scalarField *> &weights, const pointField &initialPoints) const |
| Transform the given initial pointField of the specified body. More... | |
| virtual void | write (Ostream &) const |
| Write. More... | |
| bool | read (const dictionary &dict) |
| Read coefficients dictionary and update system parameters,. More... | |
| void | operator= (const rigidBodyMotion &)=delete |
| Disallow default bitwise assignment. More... | |
| Public Member Functions inherited from rigidBodyModel | |
| TypeName ("rigidBodyModel") | |
| Runtime type information. More... | |
| rigidBodyModel () | |
| Null-constructor which adds the single root-body at the origin. More... | |
| rigidBodyModel (const dictionary &dict) | |
| Construct from dictionary. More... | |
| virtual | ~rigidBodyModel () |
| Destructor. More... | |
| label | nBodies () const |
| Return the number of bodies in the model (bodies().size()) More... | |
| PtrList< rigidBody > | bodies () const |
| Return the list of the bodies in the model. More... | |
| const DynamicList< label > & | lambda () const |
| List of indices of the parent of each body. More... | |
| const PtrList< joint > & | joints () const |
| Return the list of joints in the model. More... | |
| label | nDoF () const |
| Return the number of degrees of freedom of the model. More... | |
| bool | unitQuaternions () const |
| Return true if any of the joints using quaternions. More... | |
| const vector & | g () const |
| Return the acceleration due to gravity. More... | |
| vector & | g () |
| Allow the acceleration due to gravity to be set. More... | |
| const word & | name (const label bodyID) const |
| Return the name of body with the given ID. More... | |
| wordList | movingBodyNames () const |
| Return the names of the moving bodies. More... | |
| const rigidBodyInertia & | I (const label i) const |
| Return the inertia of body i. More... | |
| const spatialVector & | v (const label i) const |
| Return the spatial velocity of the bodies. More... | |
| virtual label | join (const label parentID, const spatialTransform &XT, autoPtr< joint > jointPtr, autoPtr< rigidBody > bodyPtr) |
| Join the given body to the parent with ID parentID via the given. More... | |
| label | join (const label parentID, const spatialTransform &XT, autoPtr< joints::composite > cJoint, autoPtr< rigidBody > bodyPtr) |
| Join the given body to the parent with ID parentID via the given. More... | |
| label | merge (const label parentID, const spatialTransform &X, autoPtr< rigidBody > bodyPtr) |
| Merge the given body with transform X into the parent with ID. More... | |
| bool | merged (label bodyID) const |
| Return true if the body with given ID has been merged with a parent. More... | |
| label | master (label bodyID) const |
| Return the ID of the master body for a sub-body otherwise. More... | |
| label | mergedBodyIndex (const label mergedBodyID) const |
| Return the index of the merged body in the mergedBody list. More... | |
| label | mergedBodyID (const label mergedBodyIndex) const |
| Return the merged body ID for the given merged body index. More... | |
| const subBody & | mergedBody (label mergedBodyID) const |
| Return the merged body for the given body ID. More... | |
| label | bodyID (const word &name) const |
| Return the ID of the body with the given name. More... | |
| spatialTransform | X0 (const label bodyId) const |
| Return the current transform to the global frame for the given body. More... | |
| vector | masterPoint (const label bodyID, const vector &p) const |
| spatialVector | v (const label bodyID, const vector &p) const |
| Return the velocity of the given point on the given body. More... | |
| void | applyRestraints (scalarField &tau, Field< spatialVector > &fx, const rigidBodyModelState &state) const |
| Apply the restraints and accumulate the internal joint forces. More... | |
| void | forwardDynamics (rigidBodyModelState &state, const scalarField &tau, const Field< spatialVector > &fx) const |
| Calculate the joint acceleration qDdot from the joint state q,. More... | |
| void | forwardDynamicsCorrection (const rigidBodyModelState &state) const |
| Correct the velocity and acceleration of the bodies in the model. More... | |
| bool | read (const dictionary &dict) |
| Read coefficients dictionary and update system parameters,. More... | |
Additional Inherited Members | |
| Static Public Member Functions inherited from motionSolver | |
| static autoPtr< motionSolver > | New (const polyMesh &, const dictionary &) |
| Select constructed from polyMesh and dictionary. More... | |
| Protected Member Functions inherited from rigidBodyModel | |
| virtual label | join_ (const label parentID, const spatialTransform &XT, autoPtr< joint > jointPtr, autoPtr< rigidBody > bodyPtr) |
| Join the given body to the parent with ID parentID via the given. More... | |
| Protected Attributes inherited from rigidBodyModel | |
| PtrList< rigidBody > | bodies_ |
| List of the bodies. More... | |
| PtrList< subBody > | mergedBodies_ |
| Bodies may be merged into existing bodies, the inertia of which is. More... | |
| HashTable< label, word > | bodyIDs_ |
| Lookup-table of the IDs of the bodies. More... | |
| DynamicList< label > | lambda_ |
| List of indices of the parent of each body. More... | |
| PtrList< joint > | joints_ |
| Each body it attached with a joint which are held on this list. More... | |
| DynamicList< spatialTransform > | XT_ |
| Transform from the parent body frame to the joint frame. More... | |
| label | nDoF_ |
| The number of degrees of freedom of the model. More... | |
| bool | unitQuaternions_ |
| True if any of the joints using quaternions. More... | |
| PtrList< restraint > | restraints_ |
| Motion restraints. More... | |
| vector | g_ |
| Acceleration due to gravity. More... | |
| DynamicList< spatialTransform > | Xlambda_ |
| Transform from the parent body to the current body. More... | |
| DynamicList< spatialTransform > | X0_ |
| Transform for external forces to the bodies reference frame. More... | |
| DynamicList< spatialVector > | v_ |
| The spatial velocity of the bodies. More... | |
| DynamicList< spatialVector > | a_ |
| The spatial acceleration of the bodies. More... | |
| DynamicList< spatialVector > | c_ |
| The velocity dependent spatial acceleration of the joints. More... | |
| DynamicList< spatialTensor > | IA_ |
| Velocity-product acceleration. More... | |
| DynamicList< spatialVector > | pA_ |
| Articulated body bias force. More... | |
| DynamicList< compactSpatialTensor > | S_ |
| Motion subspace for joints with 3 degrees of freedom. More... | |
| DynamicList< spatialVector > | S1_ |
| Motion subspace for joints with 1 degrees of freedom. More... | |
| DynamicList< compactSpatialTensor > | U_ |
| Sub-expression IA.S in the forward-dynamics algorithm. More... | |
| DynamicList< spatialVector > | U1_ |
| Sub-expression IA.S1 in the forward-dynamics algorithm. More... | |
| DynamicList< tensor > | Dinv_ |
| Sub-expression (S^T.U)^-1 in the forward-dynamics algorithm. More... | |
| DynamicList< vector > | u_ |
| Sub-expression tau - S^T.pA in the forward-dynamics algorithm. More... | |
Rigid-body mesh motion solver for fvMesh.
Applies septernion interpolation of movement as function of distance to the object surface.
Definition at line 53 of file rigidBodyMeshMotionSolver.H.
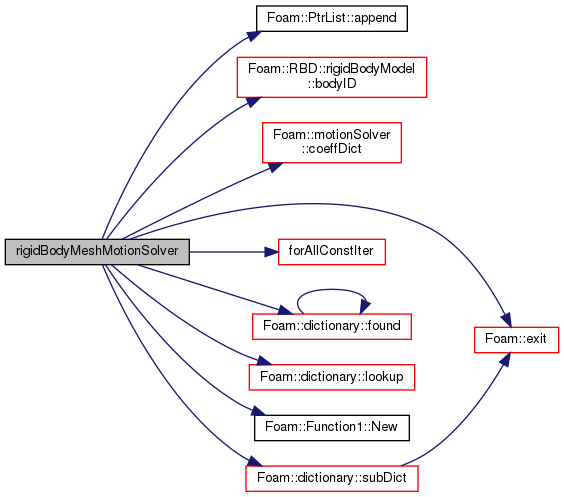
| rigidBodyMeshMotionSolver | ( | const polyMesh & | mesh, |
| const dictionary & | dict | ||
| ) |
Construct from polyMesh and dictionary.
Definition at line 69 of file rigidBodyMeshMotionSolver.C.
References PtrList< T >::append(), rigidBodyModel::bodyID(), motionSolver::coeffDict(), Foam::exit(), Foam::FatalError, FatalErrorInFunction, forAllConstIter(), dictionary::found(), dictionary::lookup(), Function1< Type >::New(), and dictionary::subDict().
| rigidBodyMeshMotionSolver | ( | const rigidBodyMeshMotionSolver & | ) |
Disallow default bitwise copy construction.
Destructor.
Definition at line 174 of file rigidBodyMeshMotionSolver.C.
| TypeName | ( | "rigidBodyMotionSolver" | ) |
Runtime type information.
|
virtual |
Return point location obtained from the current motion field.
Implements motionSolver.
Definition at line 181 of file rigidBodyMeshMotionSolver.C.
|
virtual |
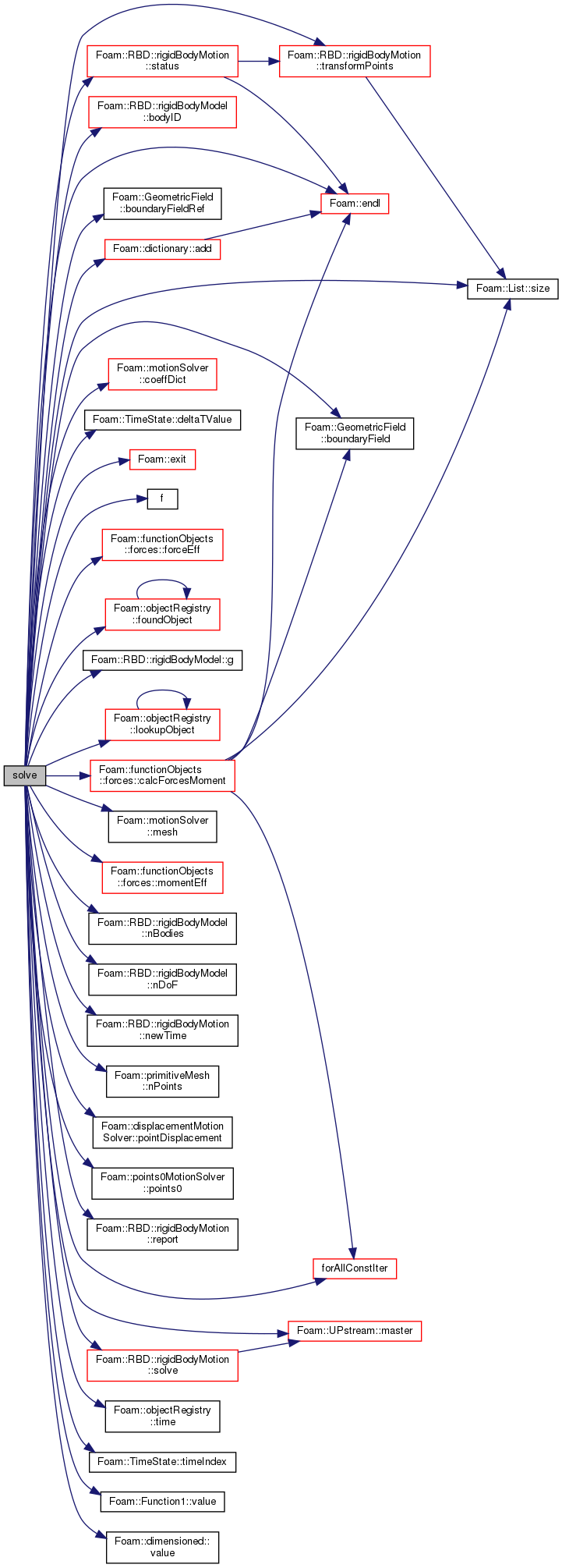
Solve for motion.
Implements motionSolver.
Definition at line 187 of file rigidBodyMeshMotionSolver.C.
References dictionary::add(), rigidBodyModel::bodyID(), GeometricField< Type, PatchField, GeoMesh >::boundaryField(), GeometricField< Type, PatchField, GeoMesh >::boundaryFieldRef(), forces::calcForcesMoment(), motionSolver::coeffDict(), TimeState::deltaTValue(), Foam::endl(), Foam::exit(), f(), Foam::FatalError, FatalErrorInFunction, forAll, forAllConstIter(), forces::forceEff(), objectRegistry::foundObject(), rigidBodyModel::g(), objectRegistry::lookupObject(), UPstream::master(), motionSolver::mesh(), forces::momentEff(), rigidBodyModel::nBodies(), rigidBodyModel::nDoF(), rigidBodyMotion::newTime(), nPoints, primitiveMesh::nPoints(), patchi, displacementMotionSolver::pointDisplacement(), points0MotionSolver::points0(), rigidBodyMotion::report(), List< T >::size(), rigidBodyMotion::solve(), rigidBodyMotion::status(), objectRegistry::time(), TimeState::timeIndex(), rigidBodyMotion::transformPoints(), Function1< Type >::value(), dimensioned< Type >::value(), Foam::Zero, and VectorSpace< Vector< scalar >, scalar, 3 >::zero.
|
virtual |
Update local data for geometry changes.
Implements motionSolver.
Definition at line 297 of file rigidBodyMeshMotionSolver.C.
|
virtual |
Update local data for topology changes.
Implements motionSolver.
Definition at line 303 of file rigidBodyMeshMotionSolver.C.
|
virtual |
Write motion state information for restart.
Reimplemented from motionSolver.
Definition at line 309 of file rigidBodyMeshMotionSolver.C.
References IOstream::ASCII, IOstream::currentVersion, dict, motionSolver::mesh(), IOobject::NO_READ, IOobject::NO_WRITE, rigidBodyMotion::state(), timeName, rigidBodyModelState::write(), and motionSolver::write().
|
delete |
Disallow default bitwise assignment.
 1.8.13
1.8.13 

