This class describes the interaction of a face and a point. It carries the info of a successful hit and (if successful), returns the interaction point. More...
Public Member Functions | |
| PointHit () | |
| Construct null. More... | |
| PointHit (const bool hit, const Point &p, const scalar dist, const bool eligibleMiss) | |
| Construct from components. More... | |
| PointHit (const Point &p) | |
| Construct from point. Hit and distance set later. More... | |
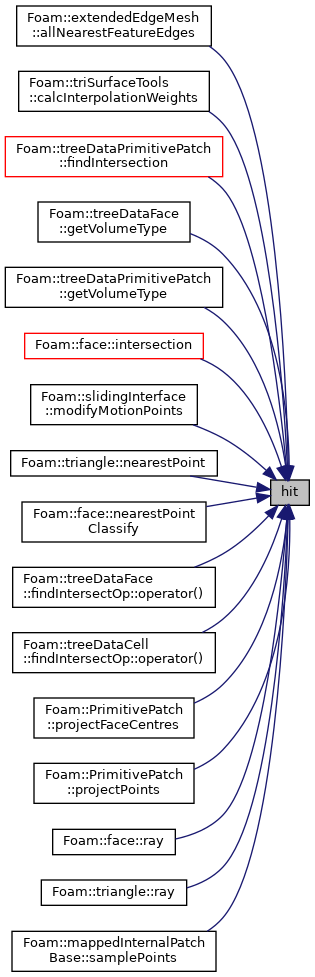
| bool | hit () const |
| Is there a hit. More... | |
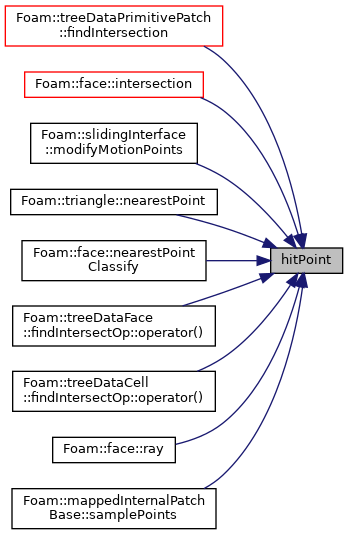
| const Point & | hitPoint () const |
| Return hit point. More... | |
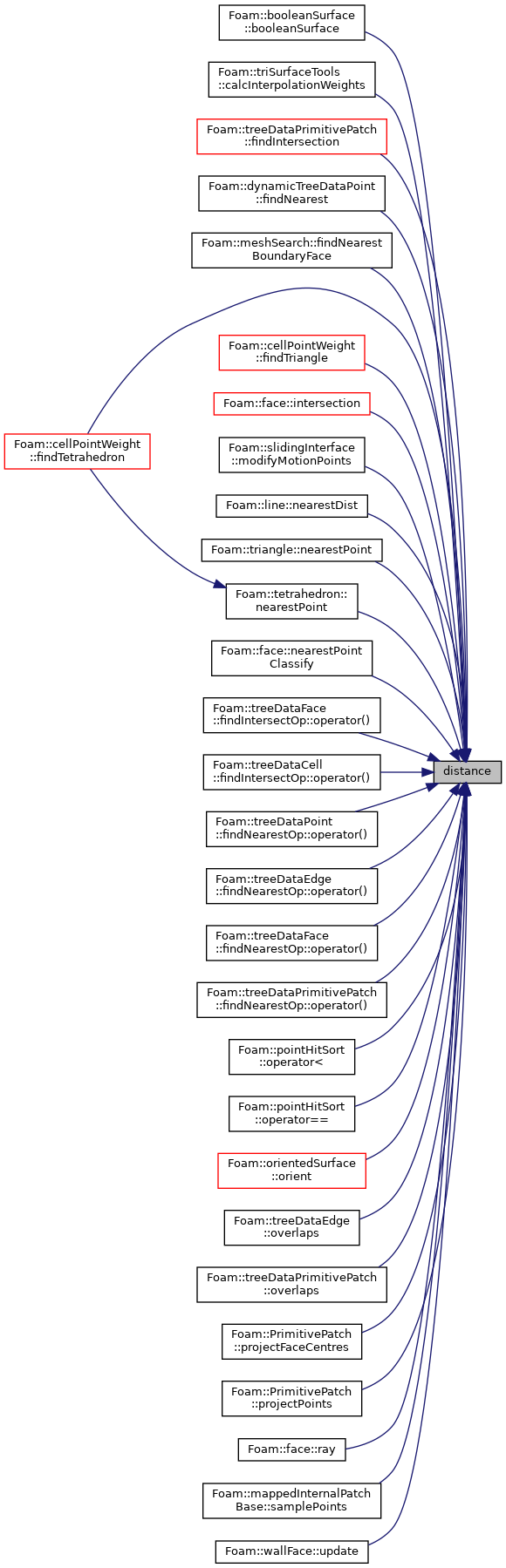
| scalar | distance () const |
| Return distance to hit. More... | |
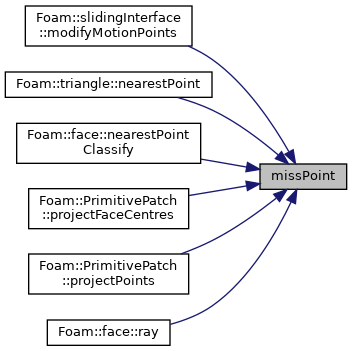
| const Point & | missPoint () const |
| Return miss point. More... | |
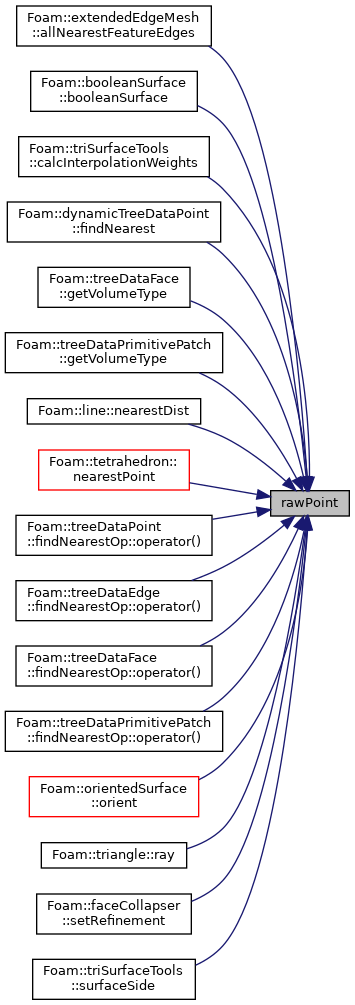
| const Point & | rawPoint () const |
| Return point with no checking. More... | |
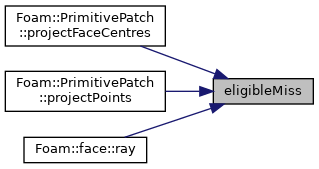
| bool | eligibleMiss () const |
| Is this an eligible miss. More... | |
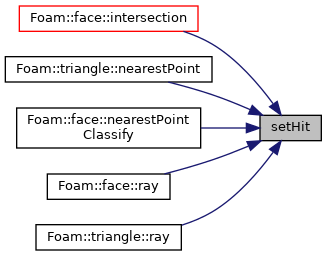
| void | setHit () |
| void | setMiss (const bool eligible) |
| void | setPoint (const Point &p) |
| void | setDistance (const scalar d) |
Friends | |
| Ostream & | operator (Ostream &os, const PointHit< Point > &b) |
This class describes the interaction of a face and a point. It carries the info of a successful hit and (if successful), returns the interaction point.
Definition at line 62 of file PointHit.H.
|
inline |
Construct null.
Definition at line 84 of file PointHit.H.
|
inline |
Construct from components.
Definition at line 93 of file PointHit.H.
|
inline |
Construct from point. Hit and distance set later.
Definition at line 108 of file PointHit.H.
|
inline |
Is there a hit.
Definition at line 120 of file PointHit.H.
Referenced by extendedEdgeMesh::allNearestFeatureEdges(), triSurfaceTools::calcInterpolationWeights(), treeDataPrimitivePatch< PatchType >::findIntersection(), treeDataFace::getVolumeType(), treeDataPrimitivePatch< PatchType >::getVolumeType(), face::intersection(), triangle< Point, PointRef >::nearestPoint(), face::nearestPointClassify(), treeDataFace::findIntersectOp::operator()(), treeDataCell::findIntersectOp::operator()(), PrimitivePatch< FaceList, PointField >::projectFaceCentres(), PrimitivePatch< FaceList, PointField >::projectPoints(), face::ray(), triangle< Point, PointRef >::ray(), and mappedInternalPatchBase::samplePoints().
|
inline |
Return hit point.
Definition at line 126 of file PointHit.H.
References Foam::abort(), Foam::FatalError, and FatalErrorInFunction.
Referenced by treeDataPrimitivePatch< PatchType >::findIntersection(), face::intersection(), triangle< Point, PointRef >::nearestPoint(), face::nearestPointClassify(), treeDataFace::findIntersectOp::operator()(), treeDataCell::findIntersectOp::operator()(), face::ray(), and mappedInternalPatchBase::samplePoints().

|
inline |
Return distance to hit.
Definition at line 139 of file PointHit.H.
Referenced by booleanSurface::booleanSurface(), triSurfaceTools::calcInterpolationWeights(), treeDataPrimitivePatch< PatchType >::findIntersection(), dynamicTreeDataPoint::findNearest(), face::intersection(), line< Point, PointRef >::nearestDist(), triangle< Point, PointRef >::nearestPoint(), tetrahedron< Point, PointRef >::nearestPoint(), face::nearestPointClassify(), treeDataFace::findIntersectOp::operator()(), treeDataCell::findIntersectOp::operator()(), treeDataPoint::findNearestOp::operator()(), treeDataEdge::findNearestOp::operator()(), treeDataFace::findNearestOp::operator()(), treeDataPrimitivePatch< PatchType >::findNearestOp::operator()(), pointHitSort::operator<(), pointHitSort::operator==(), orientedSurface::orient(), treeDataEdge::overlaps(), treeDataPrimitivePatch< PatchType >::overlaps(), PrimitivePatch< FaceList, PointField >::projectFaceCentres(), PrimitivePatch< FaceList, PointField >::projectPoints(), face::ray(), mappedInternalPatchBase::samplePoints(), triSurface::update(), and wallFace::update().
|
inline |
Return miss point.
Definition at line 145 of file PointHit.H.
References Foam::abort(), Foam::FatalError, and FatalErrorInFunction.
Referenced by triangle< Point, PointRef >::nearestPoint(), face::nearestPointClassify(), PrimitivePatch< FaceList, PointField >::projectFaceCentres(), PrimitivePatch< FaceList, PointField >::projectPoints(), and face::ray().

|
inline |
Return point with no checking.
Definition at line 158 of file PointHit.H.
Referenced by extendedEdgeMesh::allNearestFeatureEdges(), booleanSurface::booleanSurface(), triSurfaceTools::calcInterpolationWeights(), dynamicTreeDataPoint::findNearest(), treeDataFace::getVolumeType(), treeDataPrimitivePatch< PatchType >::getVolumeType(), line< Point, PointRef >::nearestDist(), tetrahedron< Point, PointRef >::nearestPoint(), treeDataPoint::findNearestOp::operator()(), treeDataEdge::findNearestOp::operator()(), treeDataFace::findNearestOp::operator()(), treeDataPrimitivePatch< PatchType >::findNearestOp::operator()(), orientedSurface::orient(), triangle< Point, PointRef >::ray(), triSurfaceTools::surfaceSide(), and triSurface::update().
|
inline |
Is this an eligible miss.
Definition at line 164 of file PointHit.H.
Referenced by PrimitivePatch< FaceList, PointField >::projectFaceCentres(), PrimitivePatch< FaceList, PointField >::projectPoints(), and face::ray().
|
inline |
Definition at line 169 of file PointHit.H.
Referenced by face::intersection(), triangle< Point, PointRef >::nearestPoint(), face::nearestPointClassify(), face::ray(), and triangle< Point, PointRef >::ray().
|
inline |
Definition at line 175 of file PointHit.H.
Referenced by triangle< Point, PointRef >::nearestPoint(), face::nearestPointClassify(), face::ray(), and triangle< Point, PointRef >::ray().
|
inline |
Definition at line 181 of file PointHit.H.
References p.
Referenced by face::intersection(), triangle< Point, PointRef >::nearestPoint(), face::nearestPointClassify(), face::ray(), and triangle< Point, PointRef >::ray().
|
inline |
Definition at line 186 of file PointHit.H.
Referenced by face::intersection(), triangle< Point, PointRef >::nearestPoint(), face::nearestPointClassify(), face::ray(), and triangle< Point, PointRef >::ray().
 1.9.1
1.9.1 

