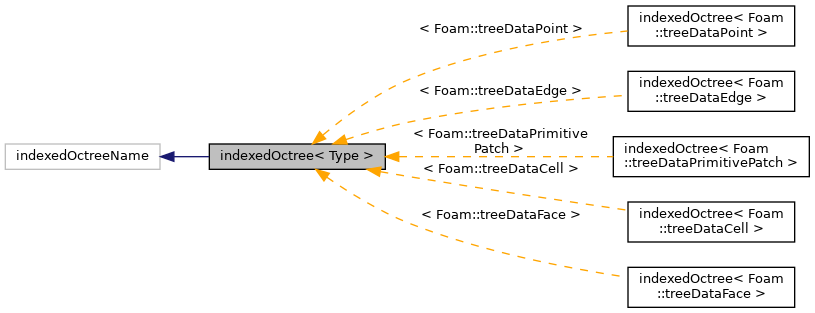
Non-pointer based hierarchical recursive searching. More...
Classes | |
| class | node |
| Tree node. Has up pointer and down pointers. More... | |
Public Member Functions | |
| indexedOctree (const Type &shapes) | |
| Construct null. More... | |
| indexedOctree (const Type &shapes, const List< node > &nodes, const labelListList &contents) | |
| Construct from components. More... | |
| indexedOctree (const Type &shapes, const treeBoundBox &bb, const label maxLevels, const scalar maxLeafRatio, const scalar maxDuplicity) | |
| Construct from shapes. More... | |
| indexedOctree (const Type &shapes, Istream &is) | |
| Construct from Istream. More... | |
| autoPtr< indexedOctree< Type > > | clone () const |
| Clone. More... | |
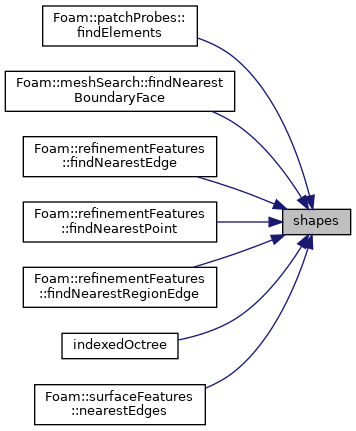
| const Type & | shapes () const |
| Reference to shape. More... | |
| const List< node > & | nodes () const |
| List of all nodes. More... | |
| const labelListList & | contents () const |
| List of all contents (referenced by those nodes that are. More... | |
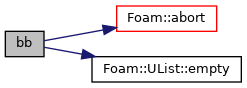
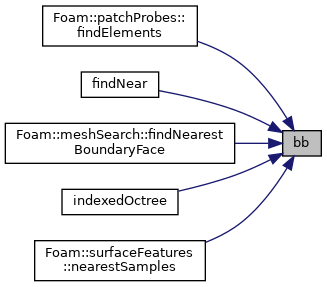
| const treeBoundBox & | bb () const |
| Top bounding box. More... | |
| pointIndexHit | findNearest (const point &sample, const scalar nearestDistSqr) const |
| Find nearest to point. More... | |
| template<class FindNearestOp > | |
| pointIndexHit | findNearest (const point &sample, const scalar nearestDistSqr, const FindNearestOp &fnOp) const |
| Calculate nearest point on nearest shape. More... | |
| template<class FindNearestOp > | |
| void | findNearest (const label nodeI, const point &, scalar &nearestDistSqr, label &nearestShapeI, point &nearestPoint, const FindNearestOp &fnOp) const |
| Low level: calculate nearest starting from subnode. More... | |
| pointIndexHit | findNearest (const linePointRef &ln, treeBoundBox &tightest, point &linePoint) const |
| Find nearest to line. More... | |
| template<class FindNearestOp > | |
| pointIndexHit | findNearest (const linePointRef &ln, treeBoundBox &tightest, point &linePoint, const FindNearestOp &fnOp) const |
| As above but with custom operation. More... | |
| pointIndexHit | findLine (const point &start, const point &end) const |
| Find nearest intersection of line between start and end. More... | |
| pointIndexHit | findLineAny (const point &start, const point &end) const |
| Find any intersection of line between start and end. More... | |
| template<class FindIntersectOp > | |
| pointIndexHit | findLine (const point &start, const point &end, const FindIntersectOp &fiOp) const |
| Find nearest intersection of line between start and end. More... | |
| template<class FindIntersectOp > | |
| pointIndexHit | findLineAny (const point &start, const point &end, const FindIntersectOp &fiOp) const |
| Find any intersection of line between start and end. More... | |
| labelList | findBox (const treeBoundBox &bb) const |
| Find (in no particular order) indices of all shapes inside or. More... | |
| labelList | findSphere (const point ¢re, const scalar radiusSqr) const |
| Find (in no particular order) indices of all shapes inside or. More... | |
| labelBits | findNode (const label nodeI, const point &) const |
| Find deepest node (as parent+octant) containing point. Starts. More... | |
| template<class ... Args> | |
| label | findInside (const point &, const Args &...) const |
| Find shape containing point. Only implemented for certain. More... | |
| const labelList & | findIndices (const point &) const |
| Find the shape indices that occupy the result of findNode. More... | |
| volumeType | getVolumeType (const point &) const |
| Determine type (inside/outside/mixed) for point. unknown if. More... | |
| template<class CompareOp > | |
| void | findNear (const scalar nearDist, const indexedOctree< Type > &tree2, CompareOp &cop) const |
| Find near pairs and apply CompareOp to them. More... | |
| void | print (prefixOSstream &, const bool printContents, const label) const |
| Print tree. Either print all indices (printContent = true) or. More... | |
| bool | write (Ostream &os) const |
| Write to a stream. More... | |
| template<class FindIntersectOp > | |
| Foam::pointIndexHit | findLine (const bool findAny, const point &treeStart, const point &treeEnd, const label startNodeI, const direction startOctant, const FindIntersectOp &fiOp, const bool verbose) const |
| template<class FindIntersectOp > | |
| Foam::pointIndexHit | findLine (const bool findAny, const point &start, const point &end, const FindIntersectOp &fiOp) const |
| template<class FindNearestOp > | |
| Foam::pointIndexHit | findNearest (const point &sample, const scalar startDistSqr, const FindNearestOp &fnOp) const |
| template<class FindNearestOp > | |
| Foam::pointIndexHit | findNearest (const linePointRef &ln, treeBoundBox &tightest, point &linePoint, const FindNearestOp &fnOp) const |
| template<class FindIntersectOp > | |
| Foam::pointIndexHit | findLine (const point &start, const point &end, const FindIntersectOp &fiOp) const |
| template<class FindIntersectOp > | |
| Foam::pointIndexHit | findLineAny (const point &start, const point &end, const FindIntersectOp &fiOp) const |
| template<class ... Args> | |
| Foam::label | findInside (const point &sample, const Args &... args) const |
Static Public Member Functions | |
| static scalar & | perturbTol () |
| Get the perturbation tolerance. More... | |
| static bool | isContent (const labelBits i) |
| static bool | isEmpty (const labelBits i) |
| static bool | isNode (const labelBits i) |
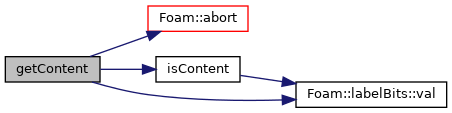
| static label | getContent (const labelBits i) |
| static label | getNode (const labelBits i) |
| static direction | getOctant (const labelBits i) |
| static volumeType | getSide (const vector &outsideNormal, const vector &vec) |
| Helper function to return the side. Returns outside if. More... | |
| static bool | overlaps (const point &bbMin, const point &bbMax, const scalar nearestDistSqr, const point &sample) |
| Helper: does bb intersect a sphere around sample? Or is any. More... | |
Friends | |
| Ostream & | operator (Ostream &, const indexedOctree< Type > &) |
Non-pointer based hierarchical recursive searching.
Definition at line 69 of file indexedOctree.H.
| indexedOctree | ( | const Type & | shapes | ) |
Construct null.
Definition at line 2114 of file indexedOctree.C.
| indexedOctree | ( | const Type & | shapes, |
| const List< node > & | nodes, | ||
| const labelListList & | contents | ||
| ) |
Construct from components.
Definition at line 2124 of file indexedOctree.C.
| indexedOctree | ( | const Type & | shapes, |
| const treeBoundBox & | bb, | ||
| const label | maxLevels, | ||
| const scalar | maxLeafRatio, | ||
| const scalar | maxDuplicity | ||
| ) |
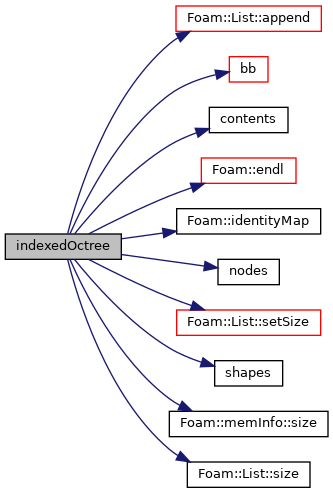
Construct from shapes.
Definition at line 2139 of file indexedOctree.C.
References List< T >::append(), indexedOctree< Type >::bb(), indexedOctree< Type >::contents(), Foam::endl(), forAll, Foam::identityMap(), Foam::nl, indexedOctree< Type >::nodes(), Foam::Pout, List< T >::setSize(), indexedOctree< Type >::shapes(), memInfo::size(), and List< T >::size().
| indexedOctree | ( | const Type & | shapes, |
| Istream & | is | ||
| ) |
Construct from Istream.
Definition at line 2303 of file indexedOctree.C.
|
static |
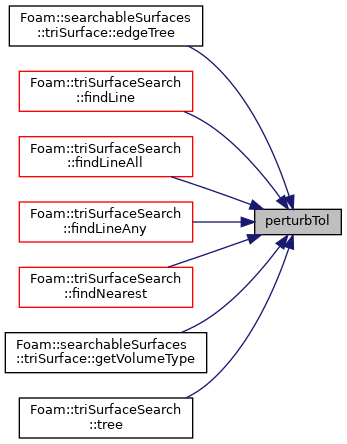
Get the perturbation tolerance.
Definition at line 2319 of file indexedOctree.C.
Referenced by triSurface::edgeTree(), triSurfaceSearch::findLine(), triSurfaceSearch::findLineAll(), triSurfaceSearch::findLineAny(), triSurfaceSearch::findNearest(), triSurface::getVolumeType(), and triSurfaceSearch::tree().
|
inline |
Clone.
Definition at line 427 of file indexedOctree.H.
|
inline |
Reference to shape.
Definition at line 441 of file indexedOctree.H.
Referenced by patchProbes::findElements(), refinementFeatures::findNearestEdge(), refinementFeatures::findNearestPoint(), refinementFeatures::findNearestRegionEdge(), indexedOctree< Type >::indexedOctree(), surfaceFeatures::nearestEdges(), and triSurface::update().
List of all nodes.
Definition at line 447 of file indexedOctree.H.
Referenced by indexedOctree< Type >::indexedOctree().

|
inline |
List of all contents (referenced by those nodes that are.
contents)
Definition at line 454 of file indexedOctree.H.
Referenced by indexedOctree< Type >::indexedOctree().

|
inline |
Top bounding box.
Definition at line 460 of file indexedOctree.H.
References Foam::abort(), UList< T >::empty(), Foam::FatalError, and FatalErrorInFunction.
Referenced by patchProbes::findElements(), indexedOctree< Type >::findNear(), indexedOctree< Type >::indexedOctree(), surfaceFeatures::nearestSamples(), and triSurface::update().
|
inlinestatic |
Definition at line 473 of file indexedOctree.H.
References labelBits::val().
Referenced by indexedOctree< Type >::getContent().


|
inlinestatic |
Definition at line 478 of file indexedOctree.H.
References labelBits::val().

|
inlinestatic |
Definition at line 483 of file indexedOctree.H.
References labelBits::val().
Referenced by indexedOctree< Type >::getNode().


Definition at line 488 of file indexedOctree.H.
References Foam::abort(), Foam::FatalError, FatalErrorInFunction, indexedOctree< Type >::isContent(), and labelBits::val().
Definition at line 498 of file indexedOctree.H.
References Foam::abort(), Foam::FatalError, FatalErrorInFunction, indexedOctree< Type >::isNode(), and labelBits::val().
Definition at line 508 of file indexedOctree.H.
References labelBits::bits().

| Foam::pointIndexHit findNearest | ( | const point & | sample, |
| const scalar | nearestDistSqr | ||
| ) | const |
Find nearest to point.
Definition at line 2326 of file indexedOctree.C.
| pointIndexHit findNearest | ( | const point & | sample, |
| const scalar | nearestDistSqr, | ||
| const FindNearestOp & | fnOp | ||
| ) | const |
Calculate nearest point on nearest shape.
Returns
| void findNearest | ( | const label | nodeI, |
| const point & | sample, | ||
| scalar & | nearestDistSqr, | ||
| label & | nearestShapeI, | ||
| point & | nearestPoint, | ||
| const FindNearestOp & | fnOp | ||
| ) | const |
Low level: calculate nearest starting from subnode.
Definition at line 489 of file indexedOctree.C.
References indexedOctree< Type >::node::bb_, treeBoundBox::searchOrder(), and indexedOctree< Type >::node::subNodes_.

| Foam::pointIndexHit findNearest | ( | const linePointRef & | ln, |
| treeBoundBox & | tightest, | ||
| point & | linePoint | ||
| ) | const |
Find nearest to line.
Returns
Definition at line 2375 of file indexedOctree.C.
References Foam::ln().

| pointIndexHit findNearest | ( | const linePointRef & | ln, |
| treeBoundBox & | tightest, | ||
| point & | linePoint, | ||
| const FindNearestOp & | fnOp | ||
| ) | const |
As above but with custom operation.
| Foam::pointIndexHit findLine | ( | const point & | start, |
| const point & | end | ||
| ) | const |
Find nearest intersection of line between start and end.
Definition at line 2427 of file indexedOctree.C.
| Foam::pointIndexHit findLineAny | ( | const point & | start, |
| const point & | end | ||
| ) | const |
Find any intersection of line between start and end.
Definition at line 2444 of file indexedOctree.C.
Referenced by triSurfaceSearch::findLineAny().

| pointIndexHit findLine | ( | const point & | start, |
| const point & | end, | ||
| const FindIntersectOp & | fiOp | ||
| ) | const |
Find nearest intersection of line between start and end.
| pointIndexHit findLineAny | ( | const point & | start, |
| const point & | end, | ||
| const FindIntersectOp & | fiOp | ||
| ) | const |
Find any intersection of line between start and end.
| Foam::labelList findBox | ( | const treeBoundBox & | bb | ) | const |
Find (in no particular order) indices of all shapes inside or.
overlapping bounding box (i.e. all shapes not outside box)
Definition at line 2487 of file indexedOctree.C.
References HashTable< T, Key, Hash >::toc().

| Foam::labelList findSphere | ( | const point & | centre, |
| const scalar | radiusSqr | ||
| ) | const |
Find (in no particular order) indices of all shapes inside or.
overlapping a bounding sphere (i.e. all shapes not outside sphere)
Definition at line 2505 of file indexedOctree.C.
References HashTable< T, Key, Hash >::toc().

| Foam::labelBits findNode | ( | const label | nodeI, |
| const point & | sample | ||
| ) | const |
Find deepest node (as parent+octant) containing point. Starts.
off from starting index in nodes_ (use 0 to start from top) Use getNode and getOctant to extract info, or call findIndices.
Definition at line 2524 of file indexedOctree.C.
References Foam::abort(), indexedOctree< Type >::node::bb_, treeBoundBox::contains(), Foam::FatalError, FatalErrorInFunction, indexedOctree< Type >::node::subNodes_, and treeBoundBox::subOctant().
Find shape containing point. Only implemented for certain.
shapes.
Referenced by triSurface::update().

| const Foam::labelList & findIndices | ( | const point & | sample | ) | const |
Find the shape indices that occupy the result of findNode.
Definition at line 2610 of file indexedOctree.C.
References indexedOctree< Type >::node::subNodes_.
| Foam::volumeType getVolumeType | ( | const point & | sample | ) | const |
Determine type (inside/outside/mixed) for point. unknown if.
cannot be determined (e.g. non-manifold surface)
Definition at line 2639 of file indexedOctree.C.
References Foam::abort(), Foam::endl(), Foam::FatalError, FatalErrorInFunction, forAll, volumeType::inside, volumeType::mixed, volumeType::outside, Foam::Pout, Foam::type(), and volumeType::unknown.
|
static |
Helper function to return the side. Returns outside if.
outsideNormal&vec >= 0, inside otherwise
Definition at line 470 of file indexedOctree.C.
Referenced by treeDataFace::getVolumeType(), and treeDataPrimitivePatch< PatchType >::getVolumeType().
|
static |
Helper: does bb intersect a sphere around sample? Or is any.
corner point of bb closer than nearestDistSqr to sample.
Definition at line 41 of file indexedOctree.C.
References boundBox::overlaps().

| void findNear | ( | const scalar | nearDist, |
| const indexedOctree< Type > & | tree2, | ||
| CompareOp & | cop | ||
| ) | const |
Find near pairs and apply CompareOp to them.
tree2 can be *this or different tree.
Definition at line 2709 of file indexedOctree.C.
References indexedOctree< Type >::bb().
| void print | ( | prefixOSstream & | os, |
| const bool | printContents, | ||
| const label | nodeI | ||
| ) | const |
Print tree. Either print all indices (printContent = true) or.
just size of contents nodes.
Definition at line 2732 of file indexedOctree.C.
References indexedOctree< Type >::node::bb_, Foam::endl(), forAll, Foam::nl, indexedOctree< Type >::node::parent_, prefixOSstream::prefix(), List< T >::size(), treeBoundBox::subBbox(), indexedOctree< Type >::node::subNodes_, and Foam::meshTools::writeOBJ().
| bool write | ( | Ostream & | os | ) | const |
Write to a stream.
Definition at line 2805 of file indexedOctree.C.
References IOstream::good().

| Foam::pointIndexHit findLine | ( | const bool | findAny, |
| const point & | treeStart, | ||
| const point & | treeEnd, | ||
| const label | startNodeI, | ||
| const direction | startOctant, | ||
| const FindIntersectOp & | fiOp, | ||
| const bool | verbose | ||
| ) | const |
Definition at line 1498 of file indexedOctree.C.
References Foam::abort(), Foam::endl(), treeBoundBox::faceBits(), Foam::FatalError, FatalErrorInFunction, PointIndexHit< Point >::hit(), Foam::nl, Foam::Pout, PointIndexHit< Point >::rawPoint(), and WarningInFunction.
| Foam::pointIndexHit findLine | ( | const bool | findAny, |
| const point & | start, | ||
| const point & | end, | ||
| const FindIntersectOp & | fiOp | ||
| ) | const |
Definition at line 1690 of file indexedOctree.C.
References treeBoundBox::intersects(), treeBoundBox::posBits(), and Foam::Zero.
| Foam::pointIndexHit findNearest | ( | const point & | sample, |
| const scalar | startDistSqr, | ||
| const FindNearestOp & | fnOp | ||
| ) | const |
Definition at line 2343 of file indexedOctree.C.
References Foam::Zero.
| Foam::pointIndexHit findNearest | ( | const linePointRef & | ln, |
| treeBoundBox & | tightest, | ||
| point & | linePoint, | ||
| const FindNearestOp & | fnOp | ||
| ) | const |
Definition at line 2394 of file indexedOctree.C.
References Foam::ln(), and Foam::Zero.

| Foam::pointIndexHit findLine | ( | const point & | start, |
| const point & | end, | ||
| const FindIntersectOp & | fiOp | ||
| ) | const |
Definition at line 2462 of file indexedOctree.C.
| Foam::pointIndexHit findLineAny | ( | const point & | start, |
| const point & | end, | ||
| const FindIntersectOp & | fiOp | ||
| ) | const |
Definition at line 2475 of file indexedOctree.C.
| Foam::label findInside | ( | const point & | sample, |
| const Args &... | args | ||
| ) | const |
Definition at line 2572 of file indexedOctree.C.
References args, forAll, and indexedOctree< Type >::node::subNodes_.
|
friend |
 1.9.1
1.9.1 

