Mesh object that implements searches within the local cells and faces. More...
Public Member Functions | |
| TypeName ("meshSearch") | |
| Run-time type information. More... | |
| meshSearch (const meshSearch &)=delete | |
| Disallow default bitwise copy construction. More... | |
| virtual | ~meshSearch () |
| Destructor. More... | |
| const indexedOctree< treeDataCell > & | cellTree () const |
| Access the cell tree. More... | |
| label | findNearestCell (const point &p) const |
| Find the cell with centre closest to the given point. More... | |
| label | findNearestFace (const point &p) const |
| Find the face with centre closest to the given point. More... | |
| label | findCell (const point &p, const pointInCellShapes=pointInCellShapes::tets) const |
| Find the cell containing the given point. More... | |
| void | operator= (const meshSearch &)=delete |
| Disallow default bitwise assignment. More... | |
 Public Member Functions inherited from DemandDrivenMeshObject< polyMesh, DeletableMeshObject, meshSearch > Public Member Functions inherited from DemandDrivenMeshObject< polyMesh, DeletableMeshObject, meshSearch > | |
| virtual const word & | type () const |
| Runtime type information. More... | |
| virtual | ~DemandDrivenMeshObject () |
| const polyMesh & | mesh () const |
| virtual bool | writeData (Foam::Ostream &) const |
| Pure virtual writaData function. More... | |
| virtual bool | writeObject (IOstream::streamFormat, IOstream::versionNumber, IOstream::compressionType, const bool write) const |
| Write using given format, version and compression. More... | |
| Public Member Functions inherited from regIOobject | |
| TypeName ("regIOobject") | |
| Runtime type information. More... | |
| regIOobject (const IOobject &, const bool isTime=false) | |
| Construct from IOobject. Optional flag for if IOobject is the. More... | |
| regIOobject (const word &newName, const IOobject &, bool registerObject) | |
| Construct from IOobject with new name, and overriding the. More... | |
| regIOobject (const regIOobject &) | |
| Copy constructor. More... | |
| regIOobject (regIOobject &&) | |
| Move constructor. More... | |
| regIOobject (const regIOobject &, bool registerCopy) | |
| Copy constructor, transferring registry registration to copy. More... | |
| virtual | ~regIOobject () |
| Destructor. More... | |
| virtual bool | global () const |
| Return true if object is global, i.e. same for all processors. More... | |
| virtual bool | globalFile () const |
| Return true if object is global, i.e. same for all processors. More... | |
| const fileName & | caseName () const |
| fileName | path () const |
| Return complete path. More... | |
| fileName | objectPath () const |
| Return complete path + object name. More... | |
| fileName | filePath () const |
| Return complete path + object name if the file exists. More... | |
| bool | checkIn () |
| Add object to registry. More... | |
| bool | checkOut () |
| Remove object from registry. More... | |
| void | addWatch () |
| Add file watch on object (if registered and READ_IF_MODIFIED) More... | |
| bool | registered () const |
| Is this object registered with the registry? More... | |
| bool | ownedByRegistry () const |
| Is this object owned by the registry? More... | |
| void | store () |
| Transfer ownership of this object to its registry. More... | |
| void | release () |
| Release ownership of this object from its registry. More... | |
| uint64_t | eventNo () const |
| Event number at last update. More... | |
| uint64_t & | eventNo () |
| Event number at last update. More... | |
| bool | upToDate (const regIOobject &) const |
| Return true if up-to-date with respect to given object. More... | |
| bool | upToDate (const regIOobject &, const regIOobject &) const |
| Return true if up-to-date with respect to given objects. More... | |
| bool | upToDate (const regIOobject &, const regIOobject &, const regIOobject &) const |
| Return true if up-to-date with respect to given objects. More... | |
| bool | upToDate (const regIOobject &, const regIOobject &, const regIOobject &, const regIOobject &) const |
| Return true if up-to-date with respect to given objects. More... | |
| void | setUpToDate () |
| Set up to date (obviously) More... | |
| virtual void | rename (const word &newName) |
| Rename. More... | |
| bool | headerOk () |
| Read and check header info. More... | |
| Istream & | readStream (const word &, const bool read=true) |
| Return Istream and check object type against that given. More... | |
| void | close () |
| Close Istream. More... | |
| virtual bool | readData (Istream &) |
| Virtual readData function. More... | |
| virtual bool | read () |
| Read object. More... | |
| const labelList & | watchIndices () const |
| Return file-monitoring handles. More... | |
| labelList & | watchIndices () |
| Return file-monitoring handles. More... | |
| virtual bool | modified () const |
| Return true if the object's file (or files for objectRegistry) More... | |
| virtual bool | dependenciesModified () const |
| Return true if the object's dependencies have been modified. More... | |
| virtual bool | readIfModified () |
| Read object if modified (as set by call to modified) More... | |
| virtual bool | write (const bool write=true) const |
| Write using setting from DB. More... | |
| void | operator= (const IOobject &)=delete |
| Assign to IOobject. More... | |
| void | operator= (const regIOobject &)=delete |
| Disallow default assignment. More... | |
| const fileName & | caseName (const bool global) const |
| fileName | path (const bool global) const |
| Return complete path including the processor sub-directory. More... | |
| fileName | objectPath (const bool global) const |
| Return complete path + object name including the processor. More... | |
| fileName | filePath (const bool global) const |
| Return complete path + object name if the file exists. More... | |
| Public Member Functions inherited from IOobject | |
| TypeName ("IOobject") | |
| Runtime type information. More... | |
| IOobject (const word &name, const fileName &instance, const objectRegistry ®istry, readOption r=NO_READ, writeOption w=NO_WRITE, bool registerObject=true) | |
| Construct from name, instance, registry, io options. More... | |
| IOobject (const word &name, const fileName &instance, const fileName &local, const objectRegistry ®istry, readOption r=NO_READ, writeOption w=NO_WRITE, bool registerObject=true) | |
| Construct from name, instance, local, registry, io options. More... | |
| IOobject (const fileName &path, const objectRegistry ®istry, readOption r=NO_READ, writeOption w=NO_WRITE, bool registerObject=true) | |
| Construct from path, registry, io options. More... | |
| IOobject (const IOobject &io, const objectRegistry ®istry) | |
| Construct from copy resetting registry. More... | |
| IOobject (const IOobject &io, const word &name) | |
| Construct from copy resetting name. More... | |
| IOobject (const IOobject &io)=default | |
| Copy constructor. More... | |
| autoPtr< IOobject > | clone () const |
| Clone. More... | |
| autoPtr< IOobject > | clone (const objectRegistry ®istry) const |
| Clone resetting registry. More... | |
| virtual | ~IOobject () |
| Destructor. More... | |
| const Time & | time () const |
| Return time. More... | |
| const objectRegistry & | db () const |
| Return the local objectRegistry. More... | |
| const word & | name () const |
| Return name. More... | |
| const word & | headerClassName () const |
| Return name of the class name read from header. More... | |
| word & | headerClassName () |
| Return name of the class name read from header. More... | |
| string & | note () |
| Return non-constant access to the optional note. More... | |
| const string & | note () const |
| Return the optional note. More... | |
| bool & | registerObject () |
| Register object created from this IOobject with registry if true. More... | |
| bool | registerObject () const |
| Register object created from this IOobject with registry if true. More... | |
| readOption | readOpt () const |
| readOption & | readOpt () |
| writeOption & | writeOpt () const |
| writeOption & | writeOpt () |
| word | group () const |
| Return group (extension part of name) More... | |
| word | member () const |
| Return member (name without the extension) More... | |
| const fileName & | rootPath () const |
| const fileName & | caseName (const bool global) const |
| fileName & | instance () const |
| Return the instance directory, constant, system, <time> etc. More... | |
| void | updateInstance () const |
| If the instance is a time directory update to the current time. More... | |
| void | updateTimeInstance () const |
| Update instance to the current time. More... | |
| const fileName & | local () const |
| fileName | path (const bool global) const |
| Return complete path including the processor sub-directory. More... | |
| fileName | objectPath (const bool global) const |
| Return complete path + object name including the processor. More... | |
| fileName | relativePath () const |
| Return the path relative to the case directory. More... | |
| fileName | relativeObjectPath () const |
| Return complete relativePath + object name. More... | |
| fileName | filePath (const bool global) const |
| Return complete path + object name if the file exists. More... | |
| bool | readHeader (Istream &) |
| Read header. More... | |
| bool | headerOk () |
| Read header of local object without type-checking. More... | |
| template<class Type > | |
| void | warnNoRereading () const |
| Helper: warn that type does not support re-reading. More... | |
| bool | writeHeader (Ostream &) const |
| Write header. More... | |
| bool | writeHeader (Ostream &, const word &objectType) const |
| Write header. Allow override of type. More... | |
| bool | good () const |
| bool | bad () const |
| InfoProxy< IOobject > | info () const |
| Return info proxy. More... | |
| void | operator= (const IOobject &) |
| template<class Name > | |
| Foam::word | groupName (Name name, const word &group) |
| Public Member Functions inherited from DeletableMeshObject< Mesh > | |
| template<class Type > | |
| DeletableMeshObject (Type &mo) | |
| virtual | ~DeletableMeshObject ()=default |
| Virtual destructor to make class polymorphic. More... | |
Static Public Member Functions | |
| static const meshSearch & | New (const polyMesh &mesh, const pointInCellShapes=pointInCellShapes::tets) |
| Lookup or construct from mesh and cell decomposition option. More... | |
| static label | findNearestCellNoTree (const polyMesh &mesh, const point &p) |
| Find the cell with centre closest to the given point. Do a. More... | |
| static label | findCellNoTree (const polyMesh &mesh, const point &p, const pointInCellShapes=pointInCellShapes::tets) |
| Find the cell containing the given point. Do a. More... | |
| Static Public Member Functions inherited from DemandDrivenMeshObject< polyMesh, DeletableMeshObject, meshSearch > | |
| static meshSearch & | New (const word &name, const polyMesh &mesh) |
| Construct and return the named DemandDrivenMeshObject. More... | |
| static meshSearch & | New (const polyMesh &mesh) |
| Construct and return the DemandDrivenMeshObject named Type::typeName. More... | |
| static meshSearch & | New (const word &name, const polyMesh &mesh, const Args &... args) |
| Construct and return the named DemandDrivenMeshObject. More... | |
| static meshSearch & | New (const polyMesh &mesh, const Args &... args) |
| Construct and return the DemandDrivenMeshObject named Type::typeName. More... | |
| static bool | found (const word &name, const polyMesh &mesh) |
| Return true if the DemandDrivenMeshObject with the given name. More... | |
| static bool | found (const polyMesh &mesh) |
| Return true if the DemandDrivenMeshObject named Type::typeName. More... | |
| Static Public Member Functions inherited from regIOobject | |
| template<class Type > | |
| static Type & | store (Type *) |
| Transfer ownership of the given object pointer to its registry. More... | |
| template<class Type > | |
| static Type & | store (autoPtr< Type > &) |
| Transfer ownership of the given object pointer to its registry. More... | |
| Static Public Member Functions inherited from IOobject | |
| static bool | fileNameComponents (const fileName &path, fileName &instance, fileName &local, word &name) |
| Split path into instance, local, name components. More... | |
| template<class Name > | |
| static word | groupName (Name name, const word &group) |
| static word | group (const word &name) |
| Return group (extension part of name) More... | |
| static word | member (const word &name) |
| Return member (name without the extension) More... | |
| template<class Stream > | |
| static Stream & | writeBanner (Stream &os, bool noHint=false) |
| Write the standard OpenFOAM file/dictionary banner. More... | |
| template<class Stream > | |
| static Stream & | writeDivider (Stream &os) |
| Write the standard file section divider. More... | |
| template<class Stream > | |
| static Stream & | writeEndDivider (Stream &os) |
| Write the standard end file divider. More... | |
| static bool | writeHeader (Ostream &os, const IOstream::versionNumber version, const IOstream::streamFormat format, const word &type, const string ¬e, const fileName &location, const word &name) |
| Write header. More... | |
| static bool | writeHeader (Ostream &, const dictionary &foamFileDict) |
| Write header. More... | |
Protected Member Functions | |
| meshSearch (const polyMesh &mesh) | |
| Construct from mesh. More... | |
| Protected Member Functions inherited from DemandDrivenMeshObject< polyMesh, DeletableMeshObject, meshSearch > | |
| DemandDrivenMeshObject (const IOobject &io, const polyMesh &mesh) | |
| Construct from mesh and IOobject. More... | |
| DemandDrivenMeshObject (const word &name, const polyMesh &mesh) | |
| Construct from mesh and name. More... | |
| DemandDrivenMeshObject (const polyMesh &mesh) | |
| Construct from mesh, the name is set to Type::typeName. More... | |
| Protected Member Functions inherited from regIOobject | |
| bool | readHeaderOk (const IOstream::streamFormat defaultFormat, const word &typeName) |
| Read header, check readOpt flags and read data if necessary. More... | |
| Protected Member Functions inherited from IOobject | |
| template<class Type > | |
| bool | typeHeaderOk (const bool checkType) |
| Read header using typeGlobalFile to find file. More... | |
Friends | |
| class | DemandDrivenMeshObject< polyMesh, DeletableMeshObject, meshSearch > |
Additional Inherited Members | |
| Public Types inherited from IOobject | |
| enum | objectState { GOOD , BAD } |
| Enumeration defining the valid states of an IOobject. More... | |
| enum | readOption { MUST_READ , MUST_READ_IF_MODIFIED , READ_IF_PRESENT , NO_READ } |
| Enumeration defining the read options. More... | |
| enum | writeOption { AUTO_WRITE = 0 , NO_WRITE = 1 } |
| Enumeration defining the write options. More... | |
| enum | fileCheckTypes { timeStamp , timeStampMaster , inotify , inotifyMaster } |
| Enumeration defining the file checking options. More... | |
| Static Public Attributes inherited from regIOobject | |
| static float | fileModificationSkew |
| Static Public Attributes inherited from IOobject | |
| static constexpr const char * | foamFile = "FoamFile" |
| Keyword for the FoamFile header sub-dictionary. More... | |
| static const NamedEnum< fileCheckTypes, 4 > | fileCheckTypesNames |
| static fileCheckTypes | fileModificationChecking |
| Type of file modification checking. More... | |
Mesh object that implements searches within the local cells and faces.
Definition at line 51 of file meshSearch.H.
|
explicitprotected |
Construct from mesh.
Definition at line 39 of file meshSearch.C.
|
delete |
Disallow default bitwise copy construction.
|
virtual |
Destructor.
Definition at line 88 of file meshSearch.C.
| TypeName | ( | "meshSearch" | ) |
Run-time type information.
|
static |
Lookup or construct from mesh and cell decomposition option.
Definition at line 60 of file meshSearch.C.
References cellShapes, Foam::faceDiagonalTris, mesh, Foam::New(), polyMesh::tetBasePtIs(), and Foam::tets.
Referenced by nearWallFields::calcAddressing(), mappedInternalPatchBase::calcMapping(), points::calcSamples(), lineFace::calcSamples(), Cloud< ParticleType >::distribute(), nonConformalCyclicLagrangianPatch::evaluate(), nonConformalProcessorCyclicLagrangianPatch::evaluate(), refinementParameters::findCells(), probes::findElements(), meshRefinement::findRegion(), containsPoints::generate(), FreeStream< CloudType >::inflow(), SurfaceFilmModel< CloudType >::inject(), InjectionModel< CloudType >::inject(), InjectionModel< CloudType >::injectSteadyState(), LagrangianMesh::locate(), Cloud< ParticleType >::mapMesh(), ConeInjection< CloudType >::topoChange(), FieldActivatedInjection< CloudType >::topoChange(), ManualInjection< CloudType >::topoChange(), MomentumLookupTableInjection< CloudType >::topoChange(), ReactingLookupTableInjection< CloudType >::topoChange(), ReactingMultiphaseLookupTableInjection< CloudType >::topoChange(), ThermoLookupTableInjection< CloudType >::topoChange(), Cloud< ParticleType >::topoChange(), triSurface::update(), and streamlines::write().
|
inline |
Access the cell tree.
Definition at line 110 of file meshSearch.H.
Referenced by mappedInternalPatchBase::calcMapping(), and triSurface::update().
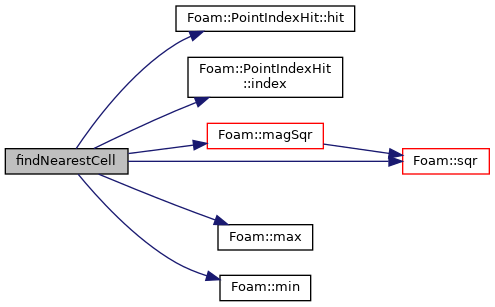
| Foam::label findNearestCell | ( | const point & | p | ) | const |
Find the cell with centre closest to the given point.
Definition at line 94 of file meshSearch.C.
References PointIndexHit< Point >::hit(), PointIndexHit< Point >::index(), Foam::magSqr(), Foam::max(), Foam::min(), p, and Foam::sqr().
|
static |
Find the cell with centre closest to the given point. Do a.
linear search through all the cells instead of using the tree.
Definition at line 112 of file meshSearch.C.
References primitiveMesh::cellCentres(), forAll, Foam::magSqr(), mesh, and p.
| Foam::label findNearestFace | ( | const point & | p | ) | const |
Find the face with centre closest to the given point.
Definition at line 138 of file meshSearch.C.
References primitiveMesh::cells(), primitiveMesh::faceCentres(), forAll, Foam::magSqr(), mesh, and p.
| Foam::label findCell | ( | const point & | p, |
| const pointInCellShapes | cellShapes = pointInCellShapes::tets |
||
| ) | const |
Find the cell containing the given point.
Definition at line 172 of file meshSearch.C.
References cellShapes, and p.
Referenced by mappedInternalPatchBase::calcMapping(), points::calcSamples(), lineFace::calcSamples(), InjectionModel< CloudType >::findCellAtPosition(), refinementParameters::findCells(), probes::findElements(), meshRefinement::findRegion(), containsPoints::generate(), Foam::tracking::locate(), and LagrangianMesh::locate().
|
static |
Find the cell containing the given point. Do a.
linear search through all the cells instead of using the tree.
Definition at line 182 of file meshSearch.C.
References cellShapes, mesh, primitiveMesh::nCells(), p, and Foam::pointInCell().
|
delete |
Disallow default bitwise assignment.
|
friend |
Definition at line 63 of file meshSearch.H.
 1.9.1
1.9.1 

